Abstract
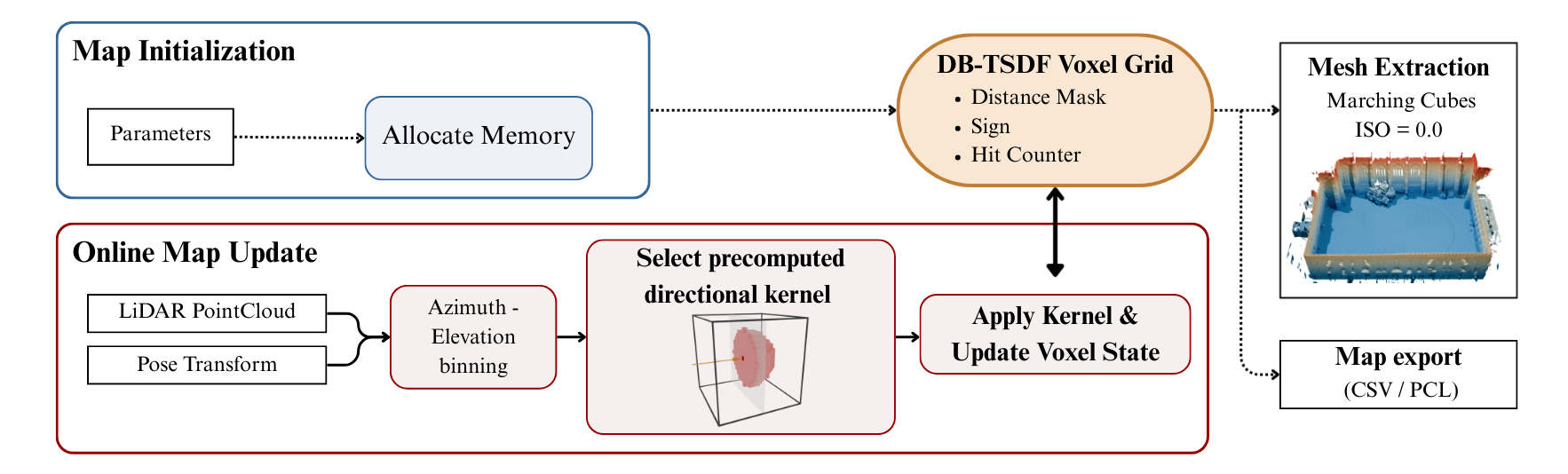
DB-TSDF is a high-efficiency, CPU-only framework for volumetric mapping. A directional bitmask-based integration scheme fuses each LiDAR return into the voxel grid with a single constant-time bitwise update, giving predictable per-scan runtime — independent of grid resolution — and high-fidelity reconstructions on platforms with limited GPU resources.